Skip to content
Services
Consulting
Architecture & technology roadmap
Redesign & refactoring
Performances, optimizations, profiling
CI/CD
Security workshops
Test strategy
Development
Embedded software
Firmware
IoT connectivity
Qt
Embedded system applications
Maintenance & security
CVE scanner
Long term support
Risk assessment & security mechanisms
ON-DEMAND RESOURCES
Consulting
Software development services overview
Software security & maintenance services
On-demand engineering resources
Expertise
Technical Expertise
Methods & Processes
Spotlight on
Edge AI
BSP Development & Catalog
Zephyr RTOS
Cyber Resilience Act (CRA)
LEARN
Embedded Software
Applications & GUI
IoT Platform
Embedded software
Industry
Medical
Industrial Machinery
Off-Highway Vehicles
Energy
Home appliances
Case Studies
Company
About us
Code of Conduct
Join us
Partners
Resources
Blog
Guides & eBooks
Webinars
Newsletter
Off-Highway Magazine
About us
Join us
Partner
English
Contact us
Technical Insights
BLOG
The best of our tips and experience on embedded development.
About us
Guides & eBooks
NEWSLETTER
Technical Expertise
All
Applications & UI
Cybersecurity
DevOps & CI/CD
Edge AI
Embedded Software
IoT Connectivity
Maintenance
Refactoring & Architecture
The DevOps playbook for off-highway
06/17/2026
GUI on MCU: what a drawing app taught us about MCU/MPU trade-offs
06/12/2026
Maximizing efficiency with Remote Device Management (RDM)
06/05/2026
ThreadX vs FreeRTOS vs Zephyr: Choosing the right open source RTOS
06/05/2026
Linux Boot Time Optimization for Embedded Systems: A Practical Guide
06/05/2026
IoT Device Security: A Strategic Guide to Bringing Secure Visions to Life
05/12/2026
Kernel Migration: Your Roadmap to Compliance and Longevity
05/12/2026
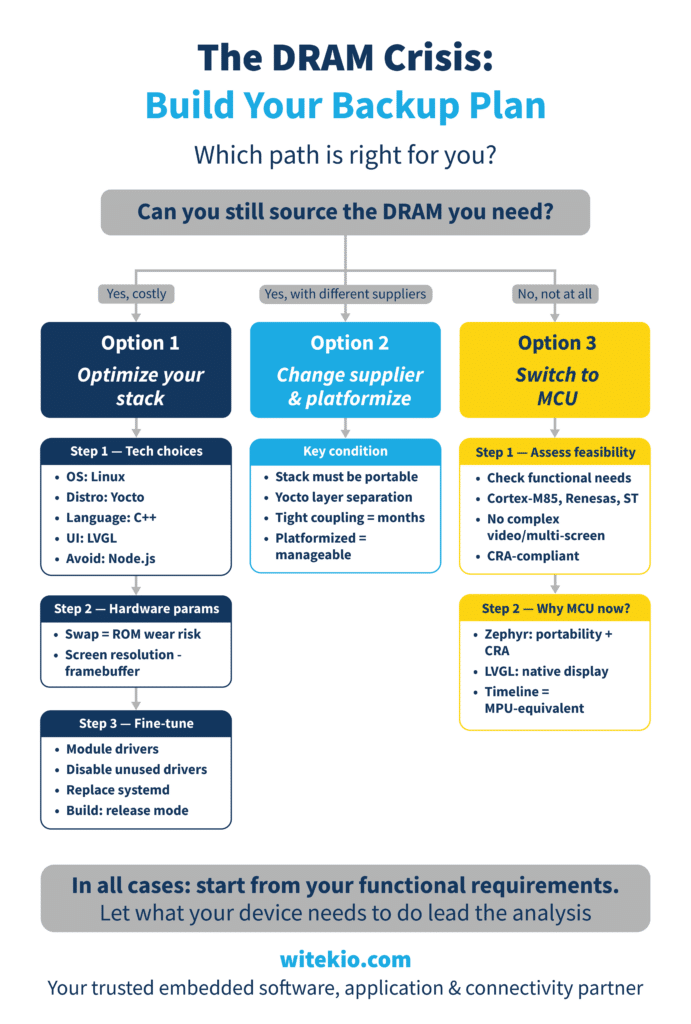
The DRAM Crisis: Why and How to Build Your Backup Plan
04/22/2026
Mastering Industrial Embedded Systems: A Guide for Modern OEMs
03/30/2026
Page
1
Page
2
Page
3
Page
4
Page
5
Page
6
Page
7
Page
8
Page
9
Page
10
Page
11
Page
12
Page
13
Page
14
Page
15
Page
16
Page
17
Page
18
Page
19
Page
20
Newsletters
Signup